Linear Algebra
Linear algebra provides the mathematical framework for representing signals as vectors, understanding transformations, and analyzing multi-dimensional systems. These concepts are essential for understanding the Fourier transform, filter design, and state-space analysis.
Vectors
Definition
A vector
In signal processing, a discrete signal
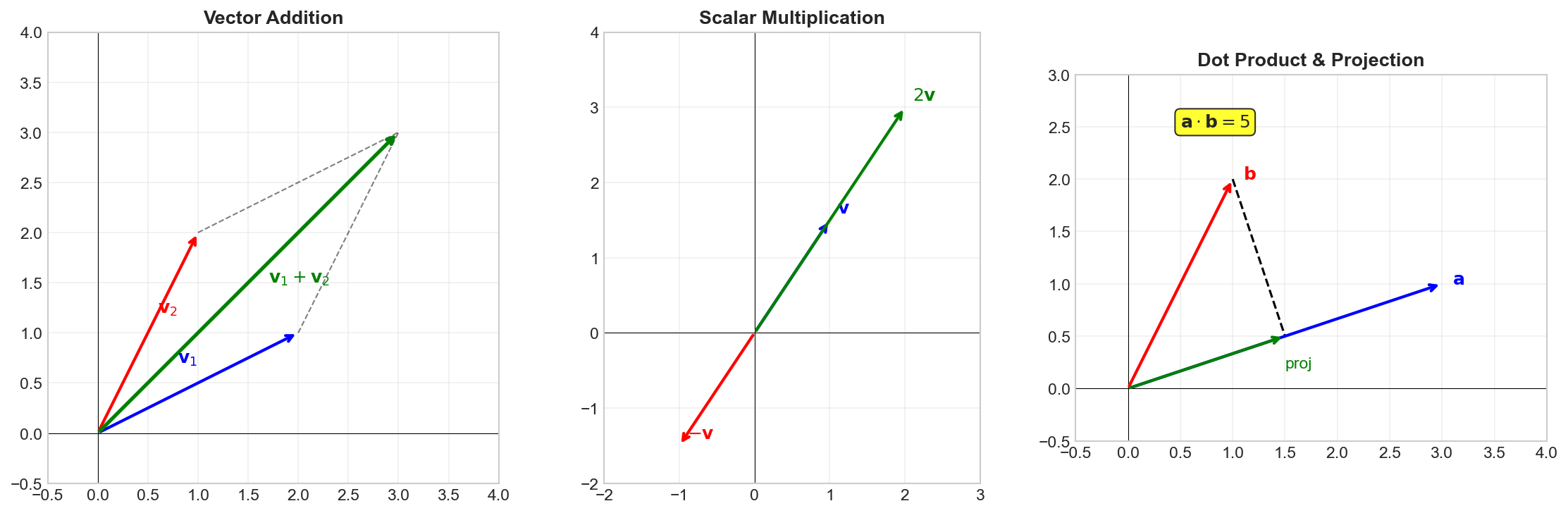
Properties
Vector Addition:
Scalar Multiplication:
Linear Combination: A vector
Linear Independence: Vectors
is
Python Implementation
import numpy as np
# Define vectors
v1 = np.array([1, 2, 3])
v2 = np.array([4, 5, 6])
# Vector operations
print(f"v1 = {v1}")
print(f"v2 = {v2}")
print(f"v1 + v2 = {v1 + v2}")
print(f"2 * v1 = {2 * v1}")
# Linear combination
c1, c2 = 0.5, 0.3
w = c1 * v1 + c2 * v2
print(f"\n{c1}*v1 + {c2}*v2 = {w}")
# Check linear independence using rank
V = np.column_stack([v1, v2])
rank = np.linalg.matrix_rank(V)
print(f"\nMatrix rank: {rank}")
print(f"Vectors are {'linearly independent' if rank == 2 else 'linearly dependent'}")Inner Products and Norms
Definition
The inner product (dot product) of two real vectors
For complex vectors
where
The norm (length) of a vector is:
Properties
Cauchy-Schwarz Inequality:
Orthogonality: Two vectors are orthogonal if
Angle Between Vectors:
Parseval's Theorem: For an orthonormal basis
Python Implementation
import numpy as np
# Real vectors
u = np.array([1, 2, 3])
v = np.array([4, 5, 6])
# Inner product and norm
inner_product = np.dot(u, v)
norm_u = np.linalg.norm(u)
norm_v = np.linalg.norm(v)
print(f"u = {u}")
print(f"v = {v}")
print(f"<u, v> = {inner_product}")
print(f"||u|| = {norm_u:.4f}")
print(f"||v|| = {norm_v:.4f}")
# Angle between vectors
cos_theta = inner_product / (norm_u * norm_v)
theta = np.arccos(cos_theta)
print(f"\nAngle between u and v: {np.degrees(theta):.2f}°")
# Complex vectors
u_complex = np.array([1 + 1j, 2 - 1j])
v_complex = np.array([1 - 1j, 1 + 1j])
# Hermitian inner product: u^H * v
inner_complex = np.vdot(u_complex, v_complex)
print(f"\nComplex inner product: {inner_complex}")
# Orthogonal vectors example
e1 = np.array([1, 0, 0])
e2 = np.array([0, 1, 0])
print(f"\n<e1, e2> = {np.dot(e1, e2)} (orthogonal)")Matrices
Definition
A matrix
Properties
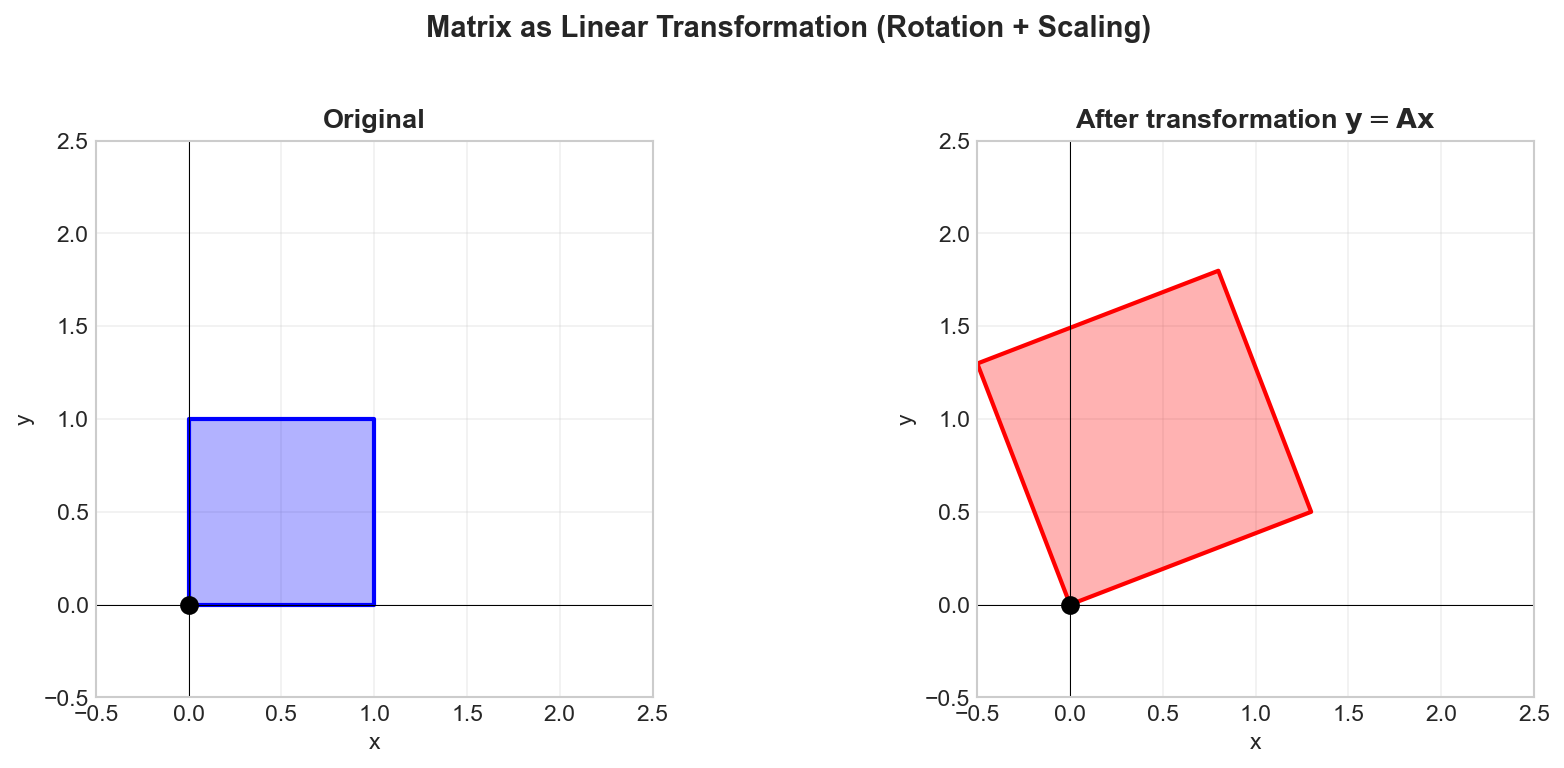
Matrix-Vector Multiplication: For
Matrix-Matrix Multiplication: For
Transpose:
Important Identities:
Python Implementation
import numpy as np
# Define a matrix
A = np.array([[1, 2, 3],
[4, 5, 6]])
# Matrix properties
print(f"A =\n{A}")
print(f"Shape: {A.shape}")
print(f"Transpose:\n{A.T}")
# Matrix-vector multiplication
x = np.array([1, 0, -1])
y = A @ x # or np.dot(A, x)
print(f"\nx = {x}")
print(f"A @ x = {y}")
# Matrix-matrix multiplication
B = np.array([[1, 2],
[3, 4],
[5, 6]])
C = A @ B
print(f"\nB =\n{B}")
print(f"A @ B =\n{C}")
# Verify (AB)^T = B^T A^T
print(f"\n(AB)^T =\n{C.T}")
print(f"B^T A^T =\n{B.T @ A.T}")Special Matrices
Definition
Several special matrix types appear frequently in signal processing:
Identity Matrix:
Diagonal Matrix:
Symmetric Matrix:
Hermitian Matrix:
Orthogonal Matrix:
Unitary Matrix:
Properties
Orthogonal/Unitary matrices preserve norms:
Toeplitz Matrix: Constant diagonals (appears in convolution):
Circulant Matrix: Toeplitz with circular structure (appears in DFT):
Python Implementation
import numpy as np
from scipy.linalg import toeplitz, circulant
# Identity matrix
I = np.eye(3)
print(f"Identity matrix:\n{I}")
# Diagonal matrix
D = np.diag([1, 2, 3])
print(f"\nDiagonal matrix:\n{D}")
# Symmetric matrix
A = np.array([[1, 2, 3],
[2, 4, 5],
[3, 5, 6]])
print(f"\nSymmetric matrix:\n{A}")
print(f"A == A^T: {np.allclose(A, A.T)}")
# Orthogonal matrix (rotation)
theta = np.pi / 4
Q = np.array([[np.cos(theta), -np.sin(theta)],
[np.sin(theta), np.cos(theta)]])
print(f"\nOrthogonal matrix (rotation by 45°):\n{Q}")
print(f"Q^T @ Q =\n{Q.T @ Q}")
# Verify norm preservation
x = np.array([1, 2])
print(f"\n||x|| = {np.linalg.norm(x):.4f}")
print(f"||Qx|| = {np.linalg.norm(Q @ x):.4f}")
# Toeplitz matrix (convolution structure)
c = [1, 2, 3] # first column
r = [1, 4, 5] # first row
T = toeplitz(c, r)
print(f"\nToeplitz matrix:\n{T}")
# Circulant matrix (DFT structure)
c = [1, 2, 3, 4]
C = circulant(c)
print(f"\nCirculant matrix:\n{C}")Eigenvalues and Eigenvectors
Definition
For a square matrix
Eigenvalues are found by solving the characteristic equation:
Properties
Eigendecomposition: If
where
Spectral Properties:
- Eigenvalues of
are
Symmetric Matrices:
- All eigenvalues are real
- Eigenvectors are orthogonal
where is orthogonal
Python Implementation
import numpy as np
import matplotlib.pyplot as plt
# Define a matrix
A = np.array([[4, 2],
[1, 3]])
# Compute eigenvalues and eigenvectors
eigenvalues, eigenvectors = np.linalg.eig(A)
print(f"A =\n{A}")
print(f"\nEigenvalues: {eigenvalues}")
print(f"\nEigenvectors (columns):\n{eigenvectors}")
# Verify: A @ v = lambda * v
for i in range(len(eigenvalues)):
v = eigenvectors[:, i]
lam = eigenvalues[i]
Av = A @ v
lam_v = lam * v
print(f"\nEigenpair {i+1}:")
print(f" A @ v = {Av}")
print(f" λ * v = {lam_v}")
print(f" Match: {np.allclose(Av, lam_v)}")
# Eigendecomposition
V = eigenvectors
Lambda = np.diag(eigenvalues)
A_reconstructed = V @ Lambda @ np.linalg.inv(V)
print(f"\nV @ Λ @ V⁻¹ =\n{A_reconstructed.real}")
# Symmetric matrix example
S = np.array([[3, 1],
[1, 3]])
eig_vals, eig_vecs = np.linalg.eigh(S) # use eigh for symmetric matrices
print(f"\nSymmetric matrix S =\n{S}")
print(f"Eigenvalues: {eig_vals}")
print(f"Eigenvectors are orthogonal: {np.allclose(eig_vecs.T @ eig_vecs, np.eye(2))}")Matrix Inverse and Determinant
Definition
The inverse of a square matrix
A matrix is invertible (non-singular) if and only if
The determinant for a
Properties
Inverse of Products:
Determinant of Products:
Linear Systems: To solve
(In practice, use LU decomposition or other numerical methods)
Python Implementation
import numpy as np
# Define a matrix
A = np.array([[4, 7],
[2, 6]])
# Determinant
det_A = np.linalg.det(A)
print(f"A =\n{A}")
print(f"det(A) = {det_A:.4f}")
# Inverse
A_inv = np.linalg.inv(A)
print(f"\nA⁻¹ =\n{A_inv}")
# Verify: A @ A^(-1) = I
print(f"\nA @ A⁻¹ =\n{A @ A_inv}")
# Solve linear system Ax = b
b = np.array([1, 2])
x = np.linalg.solve(A, b) # more numerically stable than inv(A) @ b
print(f"\nSolving Ax = b where b = {b}")
print(f"x = {x}")
print(f"Verification: A @ x = {A @ x}")
# Singular matrix (det = 0)
B = np.array([[1, 2],
[2, 4]])
det_B = np.linalg.det(B)
print(f"\nSingular matrix B =\n{B}")
print(f"det(B) = {det_B:.6f}")Orthogonality and Projections
Definition
A set of vectors
The orthogonal projection of
Properties
Gram-Schmidt Process: Converts a set of linearly independent vectors into an orthonormal set.
Orthogonal Complement: For a subspace
Projection Matrix: The projection onto the column space of
Python Implementation
import numpy as np
def gram_schmidt(V):
"""Gram-Schmidt orthonormalization."""
n = V.shape[1]
Q = np.zeros_like(V, dtype=float)
for i in range(n):
q = V[:, i].astype(float)
for j in range(i):
q = q - np.dot(Q[:, j], V[:, i]) * Q[:, j]
Q[:, i] = q / np.linalg.norm(q)
return Q
# Example vectors
v1 = np.array([1, 1, 0])
v2 = np.array([1, 0, 1])
v3 = np.array([0, 1, 1])
V = np.column_stack([v1, v2, v3])
print(f"Original vectors (columns):\n{V}")
# Orthonormalize
Q = gram_schmidt(V)
print(f"\nOrthonormalized vectors:\n{Q}")
# Verify orthonormality
print(f"\nQ^T @ Q (should be identity):\n{np.round(Q.T @ Q, 10)}")
# Projection onto a vector
u = np.array([1, 0, 0])
v = np.array([3, 4, 0])
proj = (np.dot(v, u) / np.dot(u, u)) * u
print(f"\nProjection of v={v} onto u={u}: {proj}")
# Projection matrix onto column space of A
A = np.array([[1, 0],
[0, 1],
[1, 1]])
P = A @ np.linalg.inv(A.T @ A) @ A.T
print(f"\nProjection matrix P:\n{P}")
# Project a vector
y = np.array([1, 2, 3])
y_proj = P @ y
print(f"\nProjection of y={y} onto col(A): {y_proj}")The DFT Matrix
Definition
The Discrete Fourier Transform can be expressed as a matrix-vector multiplication. The DFT matrix
where
The DFT of a signal
Properties
Unitary Property: The normalized DFT matrix
Inverse DFT:
Circulant Matrix Diagonalization: The DFT diagonalizes circulant matrices:
Python Implementation
import numpy as np
def dft_matrix(N):
"""Construct the N-point DFT matrix."""
n = np.arange(N)
k = n.reshape((N, 1))
W = np.exp(-2j * np.pi * k * n / N)
return W
# Create 4-point DFT matrix
N = 4
F = dft_matrix(N)
print(f"DFT matrix F_{N}:\n{np.round(F, 4)}")
# Verify: F^H @ F = N * I
print(f"\nF^H @ F / N (should be identity):\n{np.round(F.conj().T @ F / N, 10).real}")
# Compare with numpy FFT
x = np.array([1, 2, 3, 4])
X_matrix = F @ x
X_fft = np.fft.fft(x)
print(f"\nSignal x = {x}")
print(f"DFT via matrix: {np.round(X_matrix, 4)}")
print(f"DFT via FFT: {np.round(X_fft, 4)}")
# Inverse DFT
x_recovered = F.conj().T @ X_matrix / N
print(f"\nRecovered signal: {np.round(x_recovered.real, 4)}")
# Diagonalization of circulant matrix
from scipy.linalg import circulant
c = [1, 2, 0, 0]
C = circulant(c)
print(f"\nCirculant matrix C:\n{C}")
# Eigenvalues are DFT of first column
eigenvalues_theory = np.fft.fft(c)
eigenvalues_actual = np.linalg.eigvals(C)
print(f"\nEigenvalues from DFT: {np.round(eigenvalues_theory, 4)}")
print(f"Actual eigenvalues: {np.round(np.sort(eigenvalues_actual), 4)}")Summary
Vector Operations
| Operation | Formula |
|---|---|
| Inner product | |
| Norm | |
| Projection |
Matrix Properties
| Property | Condition |
|---|---|
| Symmetric | |
| Orthogonal | |
| Unitary | |
| Invertible |
Key Decompositions
| Decomposition | Form | Application |
|---|---|---|
| Eigendecomposition | System analysis | |
| Spectral (symmetric) | Signal energy | |
| DFT | Frequency analysis |