Chapter 2: LTI Systems
This chapter introduces Linear Time-Invariant (LTI) systems, which form the cornerstone of signal processing theory. Their mathematical tractability and widespread applicability make them essential for understanding signal analysis and system design.
This chapter focuses on LTI SISO systems (Single-Input Single-Output). The theory extends to MIMO systems through state-space representations and matrix transfer functions, which are covered in advanced courses.
Linearity
Definition
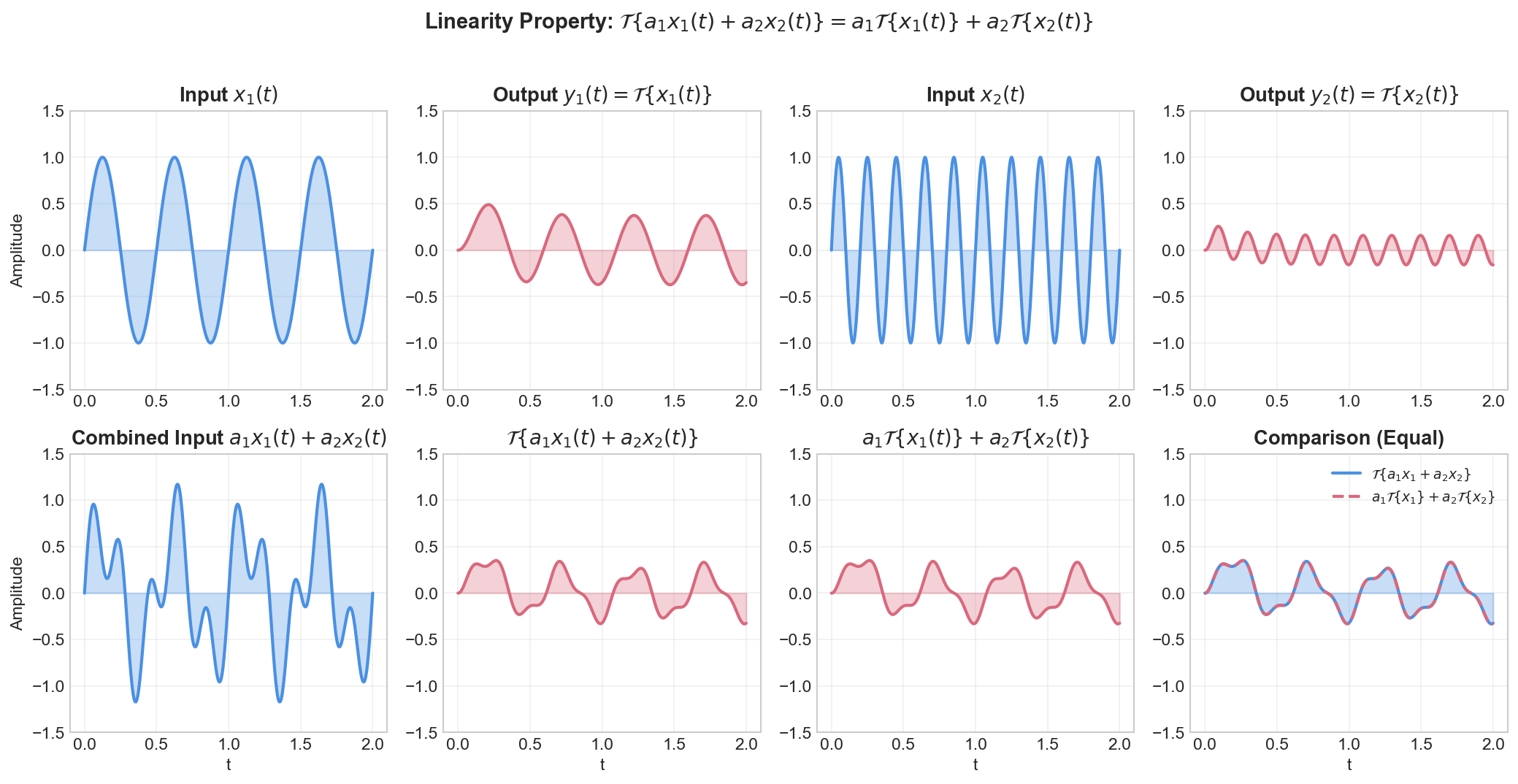
A system is linear if it satisfies the superposition principle:
for all signals
This property combines two conditions:
- Additivity:
- Homogeneity (Scaling):
Illustration
Time-Invariance
Definition
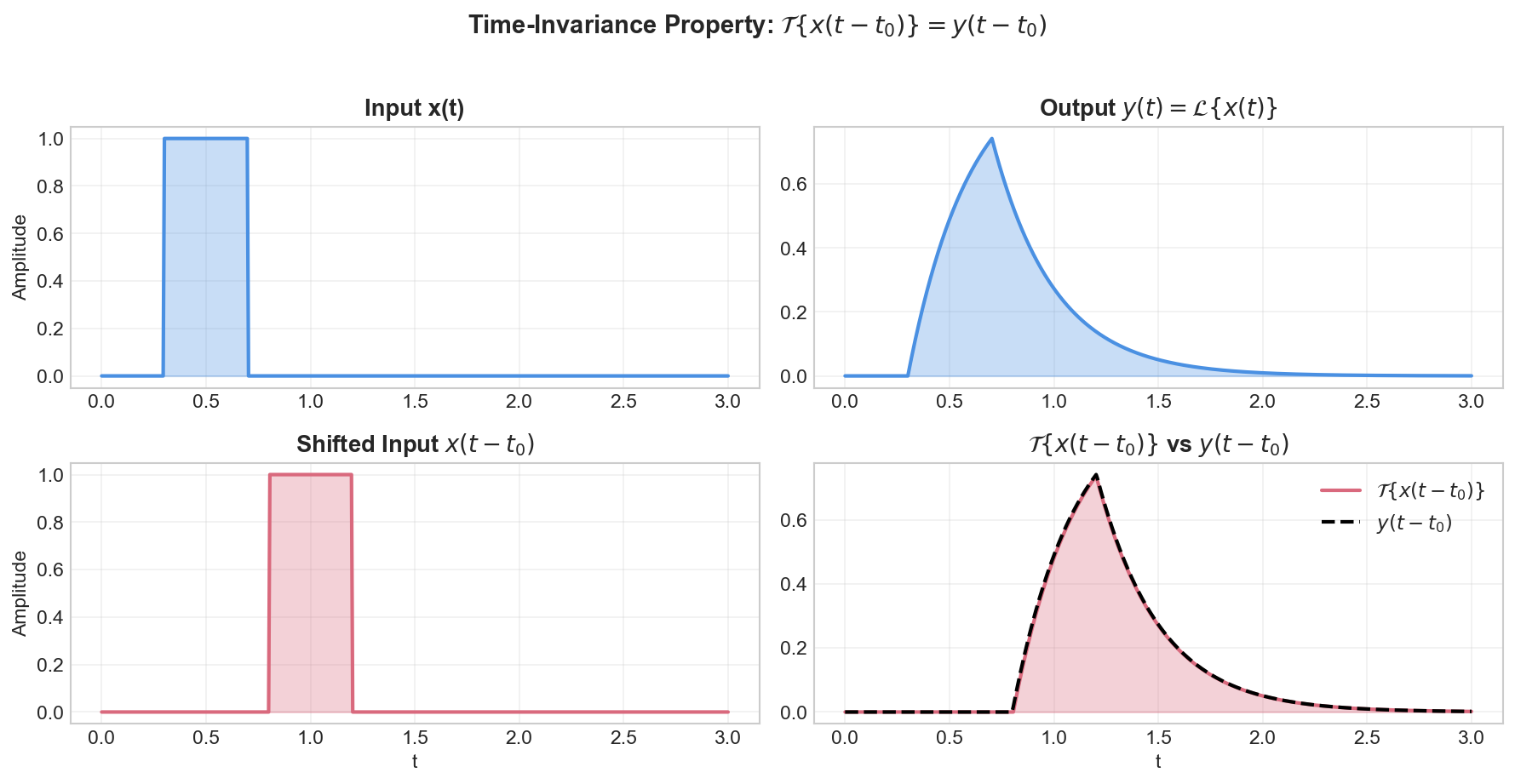
A system is time-invariant if a time shift in the input causes an identical time shift in the output:
In other words, the system's behavior does not change over time.
Illustration
Impulse Response
Definition
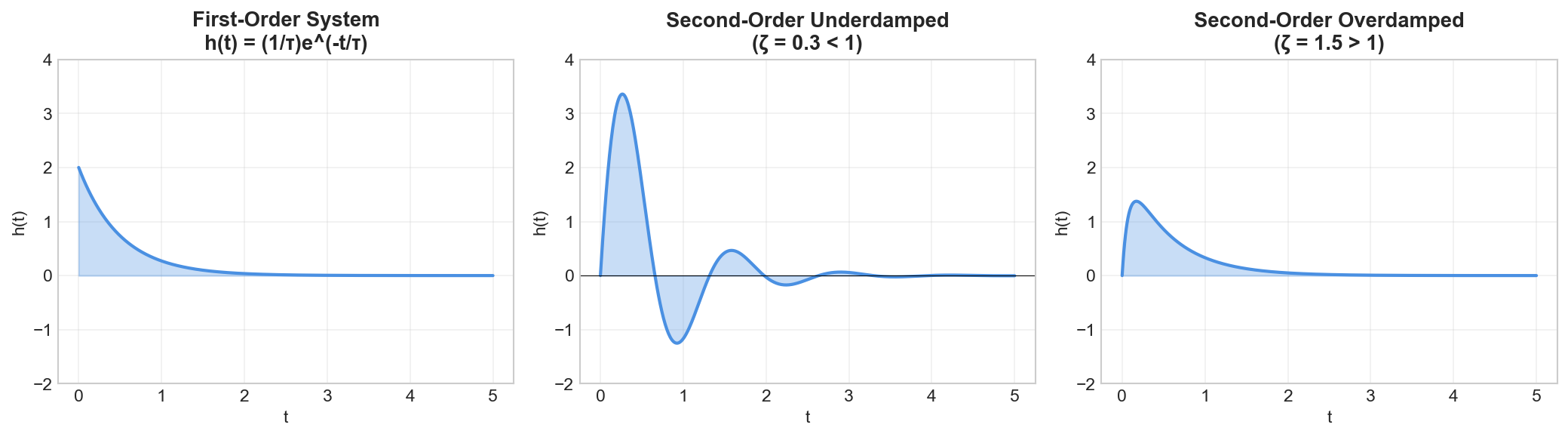
The impulse response
The impulse response completely characterizes an LTI system.
Properties
Causality: A system is causal if and only if:
BIBO Stability: A system is Bounded-Input Bounded-Output stable if and only if:
Convolution
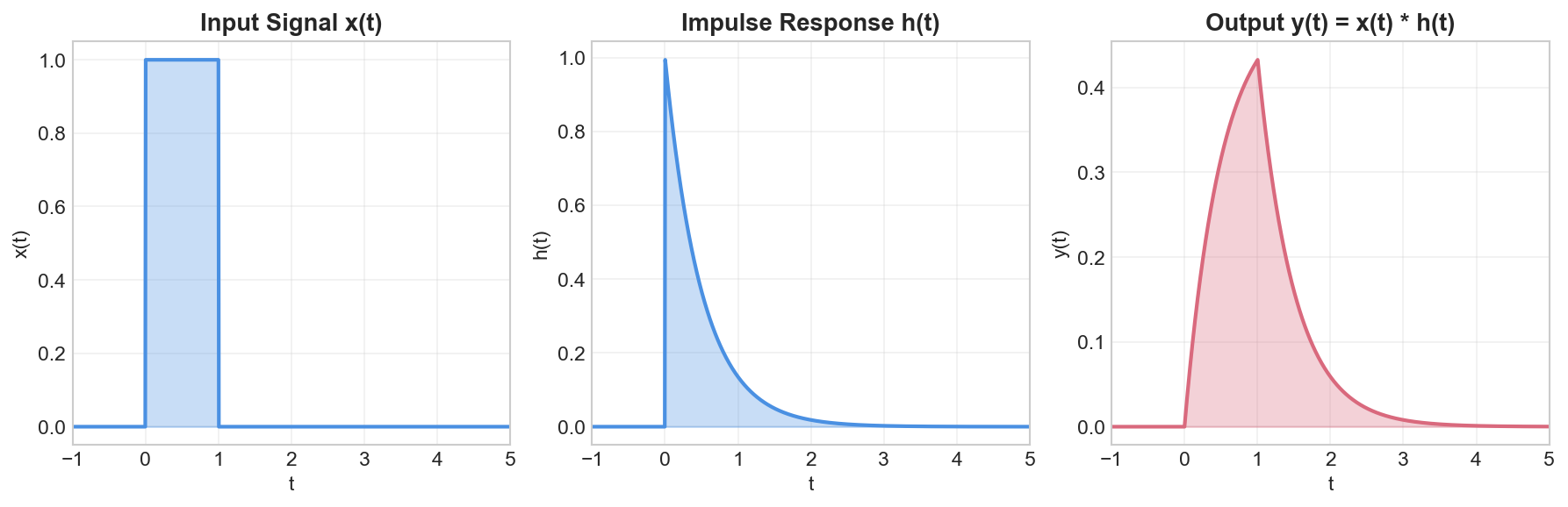
Definition
An LTI system is completely characterized by its impulse response. Given any input
Demonstration
Add proof
Properties
Commutativity:
Associativity:
Distributivity:
Identity:
Shift:
Frequency Response
Definition
The frequency response
The frequency response can be written in polar form:
where:
is the magnitude response (gain) is the phase response
Properties
Eigenfunction Property: Complex exponentials are eigenfunctions of LTI systems:
Sinusoidal Steady-State Response: For input
The output is a sinusoid at the same frequency, with amplitude scaled by
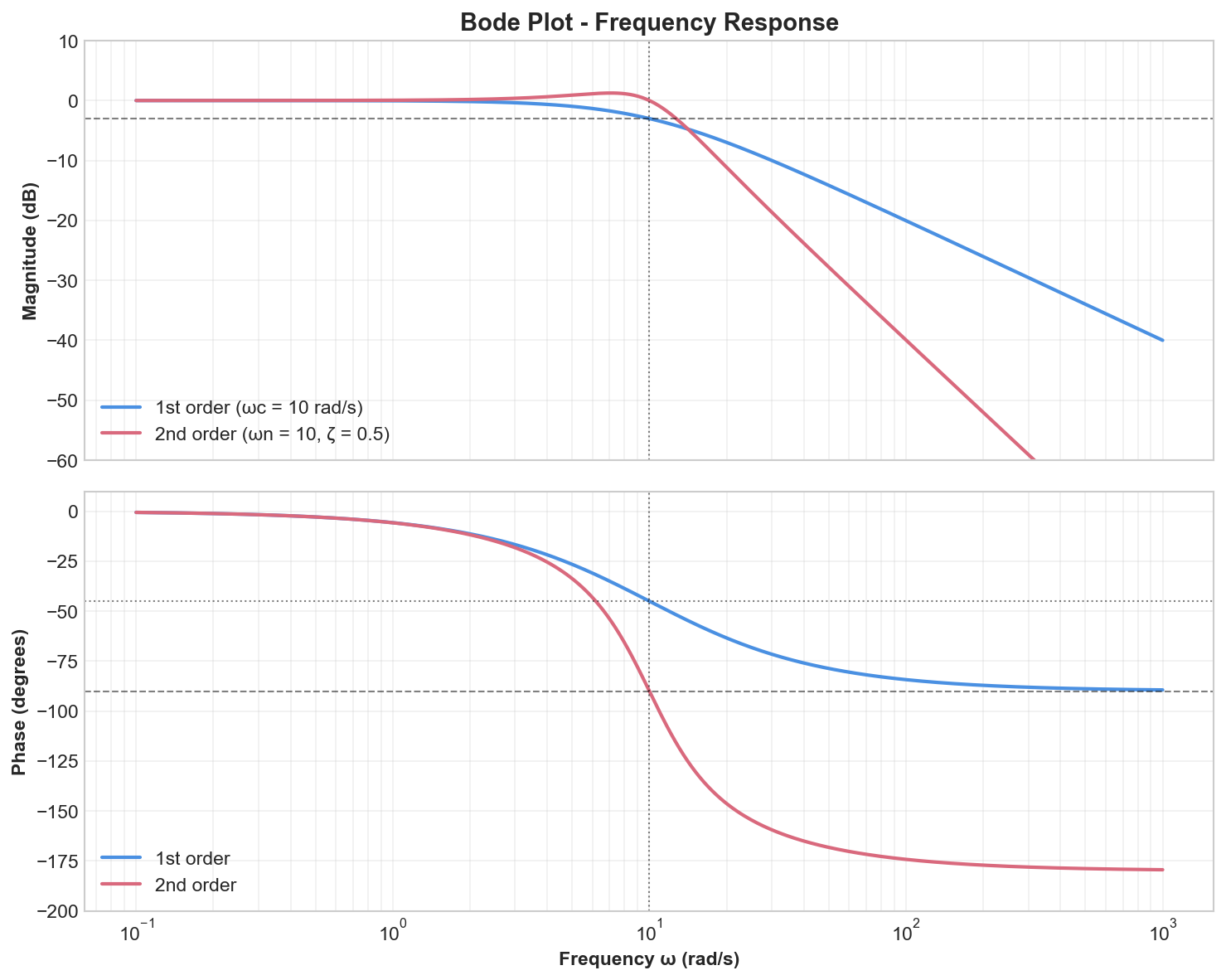
Bode Plot
The Bode plot displays the magnitude (in dB) and phase of the frequency response versus frequency on a logarithmic scale:
- Magnitude:
in dB - Phase:
in degrees
Causality and Stability
Causality
A system is causal if the output at any time depends only on present and past inputs (not future inputs).
For LTI systems: A system is causal if and only if:
BIBO Stability
A system is Bounded-Input Bounded-Output (BIBO) stable if every bounded input produces a bounded output.
For LTI systems: A system is BIBO stable if and only if the impulse response is absolutely integrable:
Summary
| Property | Definition | LTI System Criterion |
|---|---|---|
| Linearity | Superposition holds | |
| Time-Invariance | Shift in → Shift out | |
| Causality | Output depends only on past/present | |
| BIBO Stability | Bounded input → Bounded output |
Key Results:
- LTI systems are completely characterized by their impulse response
- Output is computed via convolution:
- Frequency response
describes sinusoidal steady-state behavior - Convolution in time ↔ Multiplication in frequency